

Ji Ma/ 马骥
I am a third-year Ph.D. student at ArcLab, The University of Hong Kong, advised by Prof. Peng LU. Previously, I received my B.Eng. degree in Information Engineering from Jilin University (2019-2023).
My research focuses on robust robot intelligence, especially at the intersection of reinforcement learning, legged locomotion, and motion planning.
Featured Research
Advanced Science
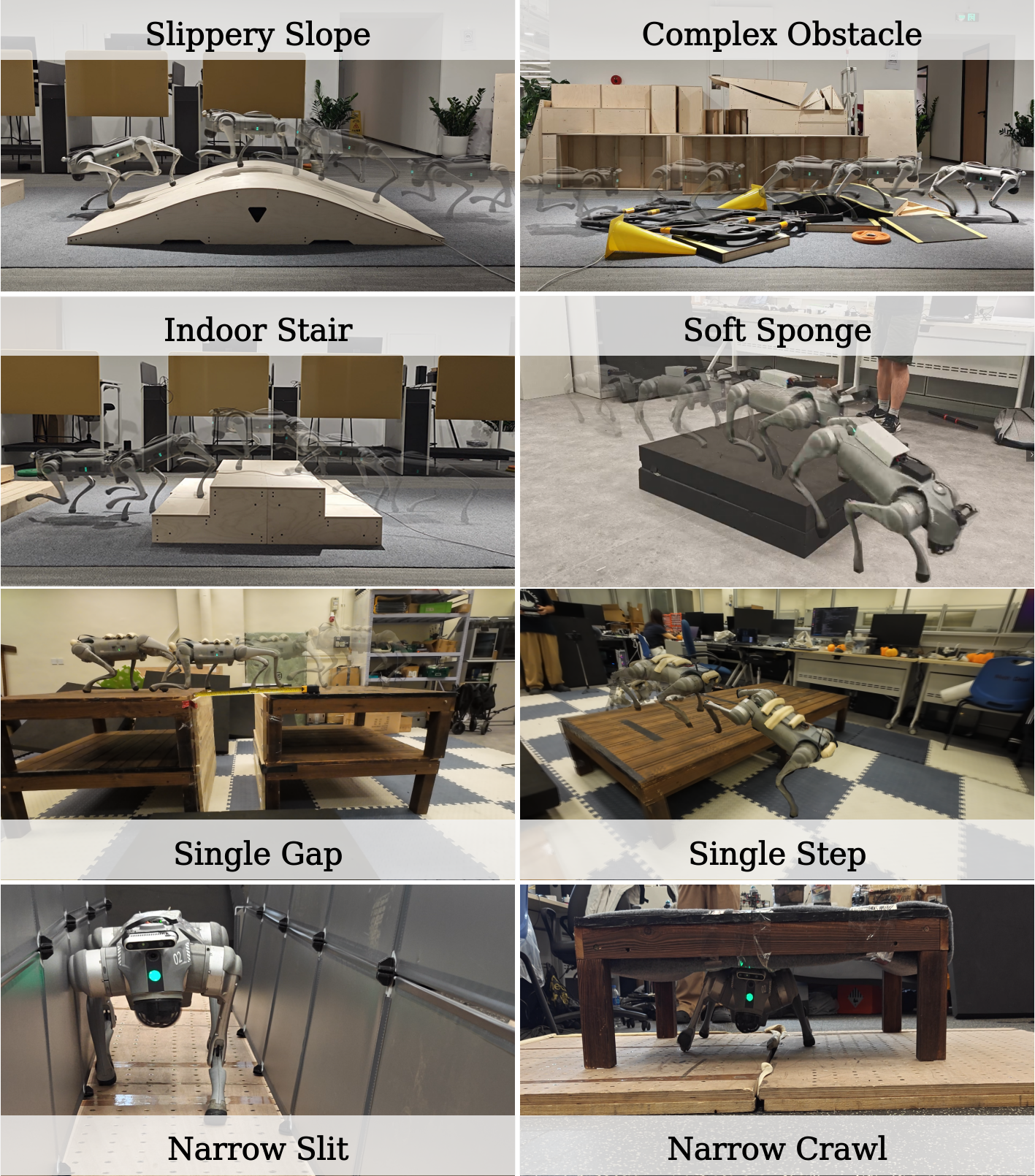
MGDP: Mastering a Generalized Depth Perception Model for Quadruped Locomotion
JCR Q1 · Impact Factor 14.1
IEEE T-RO
MARG: MAstering Risky Gap Terrains for Legged Robots with Elevation Mapping
JCR Q1 · Impact Factor 10.5
IROS
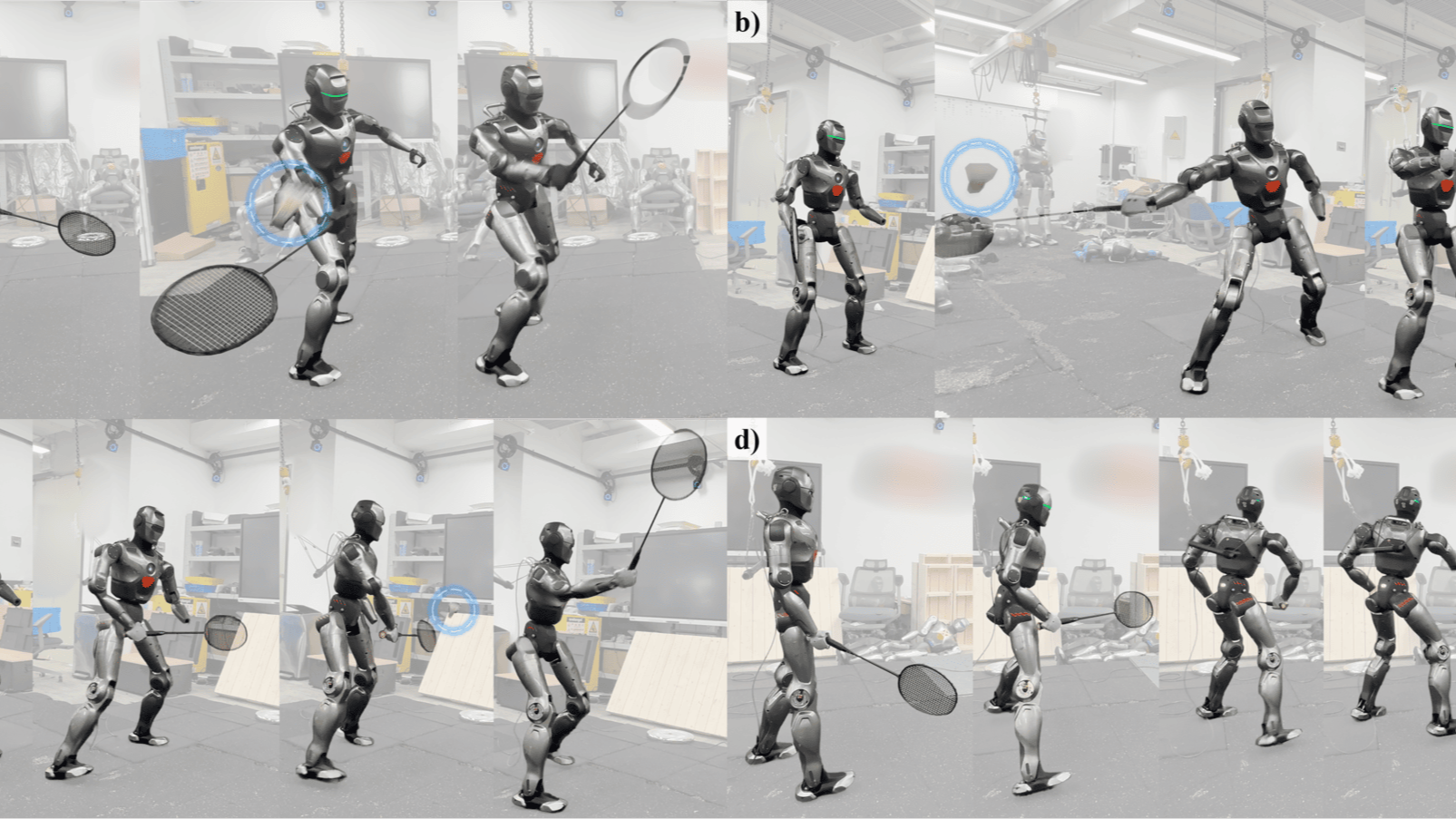
Like Playing a Video Game: Spatial-Temporal Optimization of Foot Trajectories for Controlled Football Kicking in Bipedal Robots
Best RoboCup Paper Award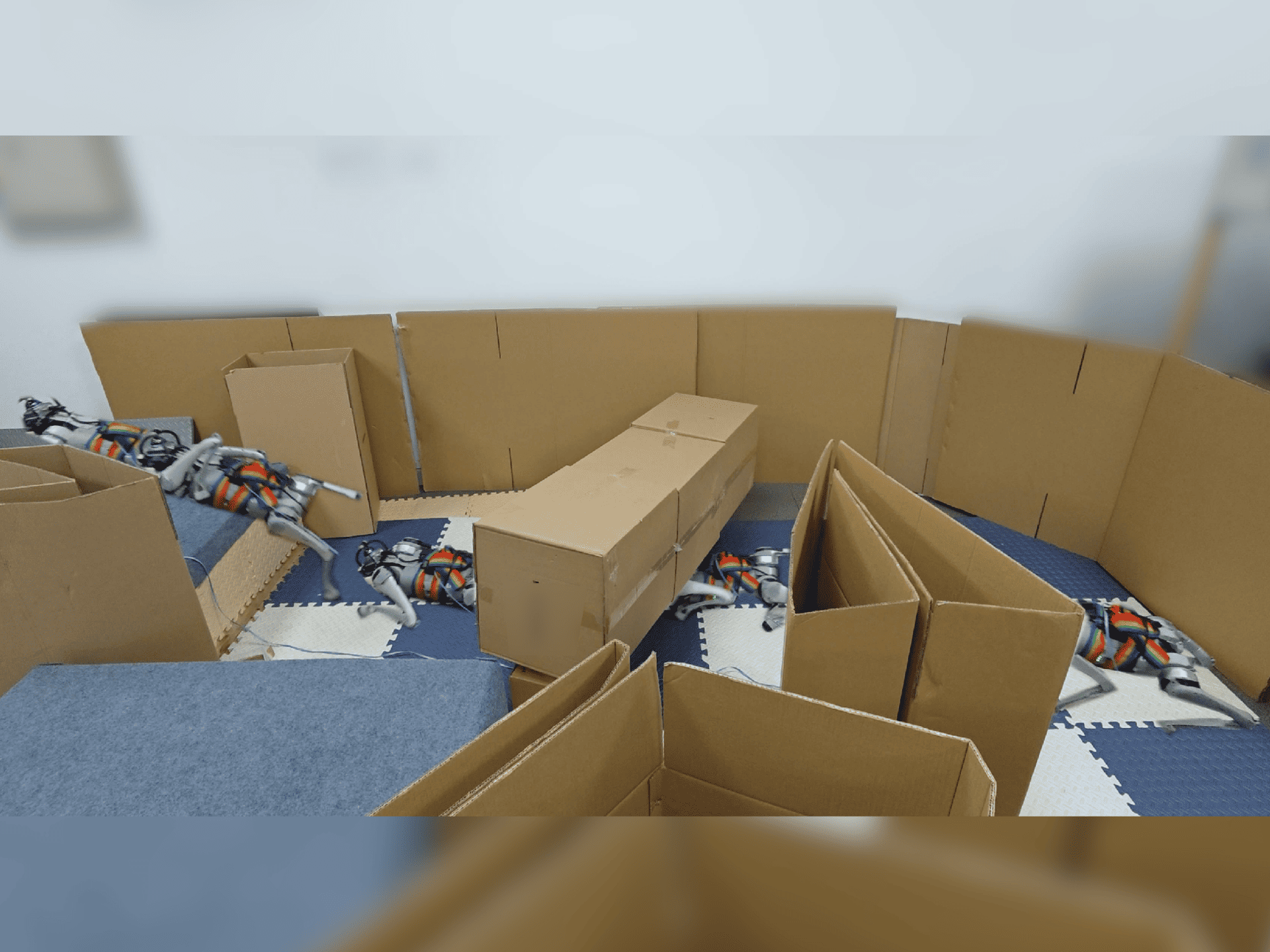
IEEE RA-L
Learning Autonomous and Safe Quadruped Traversal of Complex Terrains Using Multi-Layer Elevation Maps
Featured in IEEE Spectrum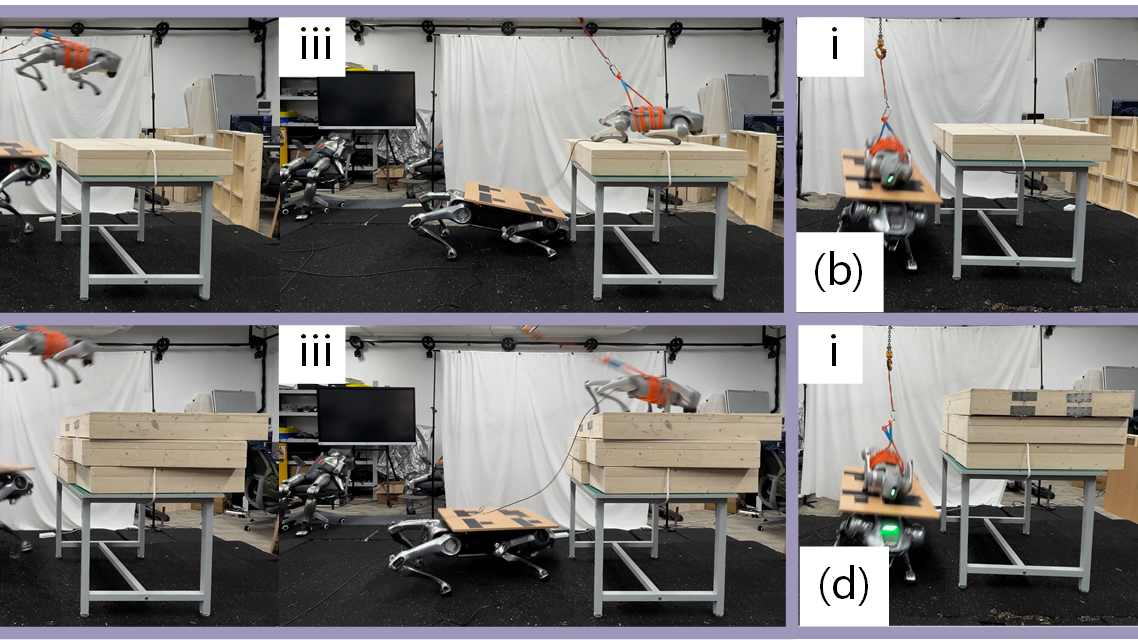
Recognition
Academic Honors
-
2025
Best RoboCup Paper Award
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) -
2024
ICRA Quadruped Robot Challenges
2nd Place -
2022
ICRA RoboMaster University AI Challenge (RMUA)
3rd Place -
2022
ICRA RoboMaster University Sim2Real Challenge (RMUS)
2nd Place -
2022
Robomaster AI Challenge Open Source Outstanding Prize
Community
Academic Service
-
Journal
Reviewer
IEEE Robotics and Automation Letters (RA-L)
Journal of Field Robotics (JFR) -
Conf.
Reviewer
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
IEEE International Conference on Robotics and Automation (ICRA)
Conference on Robot Learning (CoRL)